

6- La respuesta de fase
En anteriores artículos nos hemos centrado en entender qué es una función de transferencia y cómo interpretar la estimación de la magnitud. En este, nos centraremos en interpretar el trazo de fase.
Hagámonos una pregunta. Sí el trazo de magnitud nos aporta información sobre el nivel a través de la frecuencia y la fase la información del tiempo a través de la frecuencia, cómo debería ser la respuesta de fase de dos señales que tienen el mismo tiempo y polaridad por frecuencia?
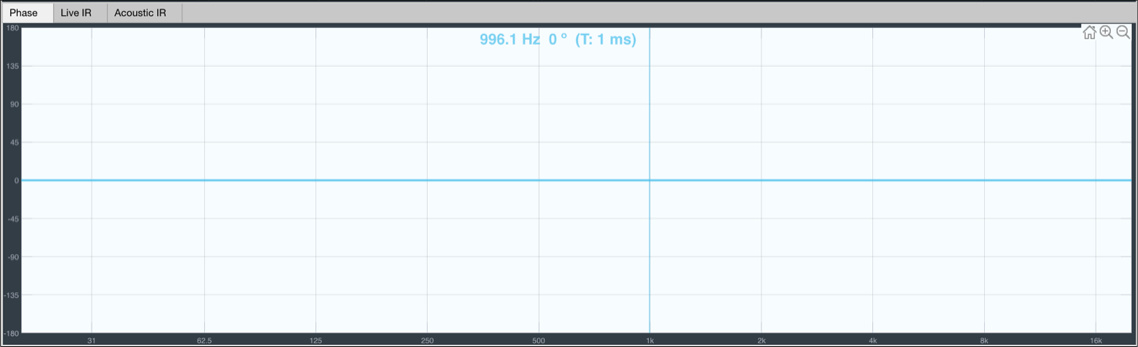
Correcto, una linea recta centrada en 0 grados. Esta linea recta nos indica que todas las frecuencias entran y salen en el mismo tiempo.
Recordemos del primer artículo, Fundamentos, que podemos expresar la longitud de onda o el periodo de una frecuencia como un círculo y eso nos permitirá relacionar cualquier tiempo en grados.
Y cómo sería la respuesta si ambas señales (entrada y salida) tuvieran el mismo tiempo pero polaridades distintas?

Pues exactamente lo mismo, pero con la linea centrada en 180º ya que todas las frecuencias tienen una diferencia relativa de 180º. Recordemos que la polaridad no implica un cambio de tiempo sino un cambio de signo.
En un ajuste de sistemas real siempre nos vamos a encontrar con diferencias de tiempo y estas diferencias las podremos dividir en 2 tipos: diferencias de distancia y diferencias de “retraso de grupo” Veamos cada una de ellas.
Imaginemos ahora que obtenemos una función de transferencia de una mesa digital con latencia 2 segundos. La consola retrasará todas las frecuencias exactamente el mismo tiempo y eso nos lo debe mostrar la estimación de la respuesta de fase.

Ahora la linea de fase es descendente, indicativo de que la señal de salida está retrasada respecto de la señal de entrada. Y el trazo nos indicará, en grados, cuál es la diferencia de tiempo por frecuencia.
90º @ 125Hz = 2ms / 180º @ 250Hz = 2ms / 270º @ 375 Hz = 2ms / 360º @ 500Hz = 2ms
Es decir, el trazo de fase nos muestra que existe un retraso entre la salida y la entrada (pendiente descendente) y que este retraso es idéntico para todas las frecuencias.
Imaginemos ahora que la señal de salida (medición) está adelantada 1 ms respecto de la señal de entrada (referencia). Aunque pueda parecer que esto no tiene sentido, veremos más adelante que todo dependerá de la sincronización.

En ambos casos nos encontramos con un ejemplo claro de diferencia de distancia, es decir, una diferencia de tiempo que es igual para todas las frecuencias y la pendiente de fase nos dirá si la medición está adelantada o retrasada respecto de la referencia.
Cuando nos encontremos con dos mediciones retrasadas, aquella que tiene más pendiente es la que tiene mayor retraso
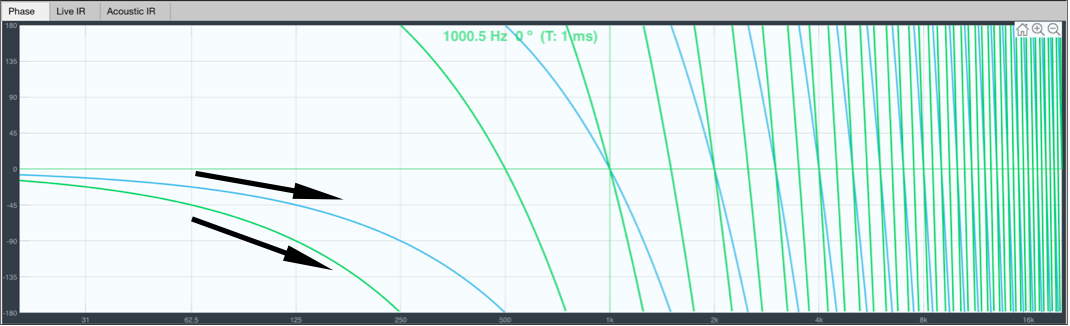
El trazo verde está más retrasado que el trazo azul, exactamente 1 ms más.
Bien, hasta ahora hemos visto las diferencias de tiempo como una diferencia de tiempo igual para todas las frecuencias, pero hay más. Veamos la siguiente función de transferencia:
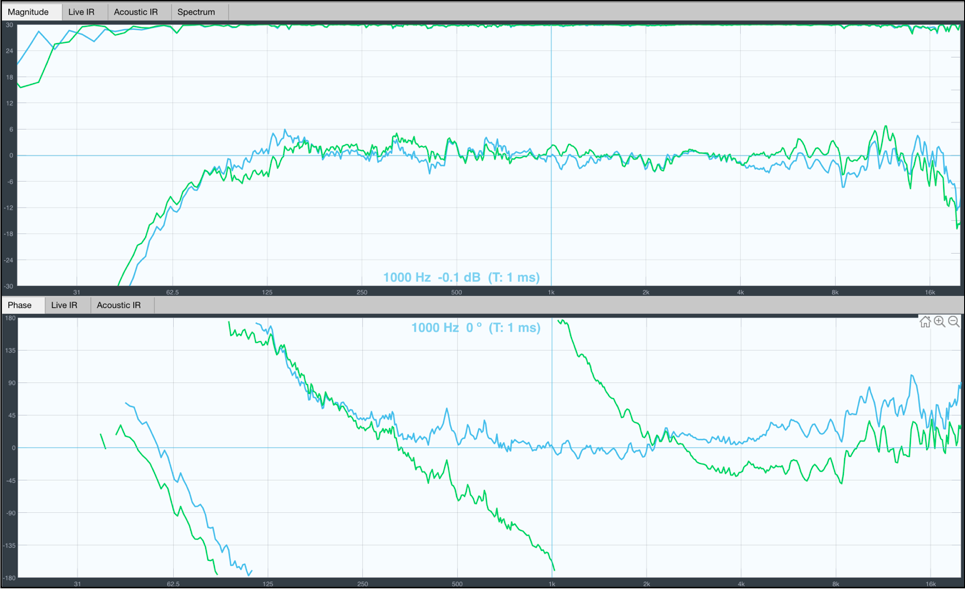
Ambos altavoces tienen el mismo tiempo, nivel y respuesta en frecuencia pero “retrasos de grupo” distintos.
Realmente se define el retraso de grupo como la derivada de la fase respecto de la frecuencia, pero solemos utilizar el concepto “retraso de grupo” o “distorsión de fase” como la capacidad que tiene un altavoz de reproducir todas las frecuencias al mismo tiempo.
Y qué significan ahora estos trazos de fase? Si cada uno de los altavoces fuera capaz de reproducir al mismo tiempo la señal de referencia para todas sus frecuencias su trazo de fase debería ser una linea recta centrada en 0º, claramente esto no sucede.
El trazo de fase nos muestra el tiempo en el cual se está reproduciendo cada frecuencia.

Podemos observar que el altavoz verde tiene una vuelta más de giro de fase, es decir, reproduce las frecuencias más tarde que el altavoz azul. A pesar de que ambos tienen el mismo tiempo.
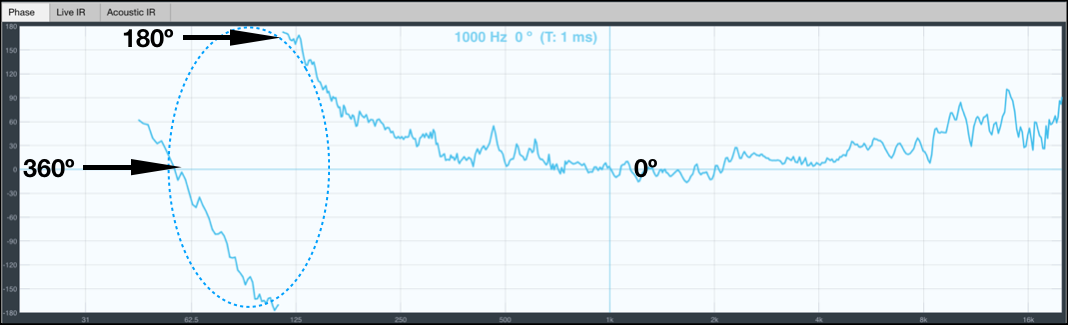
El altavoz azul tiene un giro de fase entre, aproximadamente, 62.5 Hz y 20 kHz. Es decir, 62.5 se está reproduciendo 16 ms más tarde
El altavoz verde tiene dos giros de fase entre, aproximadamente, 62.5 Hz y 20 kHz. Es decir, 62.5 se está reproduciendo 32 ms más tarde
Si desenrollamos la fase (Unwrap phase) podemos ver esta diferencia de “retraso de grupo”

Y como conclusión, estar en tiempo y polaridad no siempre significa estar perfectamente optimizado, porque, como vemos, los altavoces pueden tener “retrasos de grupo” distintos.

En un ajuste real utilizaremos el trazo de fase para relacionar el tiempo, la polaridad y el retraso de grupo de todos los altavoces que conforman nuestro sistema.
No Comments